














- Stock: In Stock
- Product code: 00-00012534







3D SLAM Scanner for Large Areas XGRIDS L2 Pro 16/120 Standard Package
The 3D SLAM scanner XGRIDSL2Pro32/300 is designed for scanning large areas. A representative of the premium line of SLAM scanners, it combines a LiDAR module, dual 48 MP panoramic cameras, and IMU sensors, enhanced by AI algorithms. This set ensures instantaneous generation of dense and colored point clouds, comparable in quality to post-processing — unprecedentedly fast and accurate.
Advantages of the XGRIDS L2 Pro 16/120 3D Scanner
- Scanning range up to 300 m – extended spatial coverage while maintaining high data density.
- Scanning speed 640,000 points/s – accelerated data collection and time savings in field conditions.
- Photo-realistic clouds: thanks to the LixelUpSample™ algorithm and dual 48 MP cameras, a density of ~1 million points/m² and color accuracy are achieved.
- High accuracy – relative ±1 cm and absolute up to 3 cm, which is important for geodesic and engineering tasks.
- Real-time direct input/output – colored 3D models immediately after scanning without additional processing.

How the XGRIDS L2 Pro 3D Scanner Works
The XGRIDS L2 Pro scanning process consists of several sequential stages:
1. LiDAR Scanning
The LiDAR device (laser rangefinder) generates infrared laser pulses (wavelength 905 nm) that propagate in various directions thanks to a rotating module. When the laser beam reflects off an object, the device records the time it took for the signal to return and calculates the distance. This forms a three-dimensional "point cloud" that reflects the structure of the space.
2. Color Digital Camera
Built-in 48 MP panoramic cameras (usually two) capture images of the surrounding environment. These images are synchronized with LiDAR data, forming a 3D model with colored points (RGB representation).
3. IMU and AI‑SLAM
The Inertial Measurement Unit (IMU) tracks the scanner's movement and position. Thanks to SLAM (Simultaneous Localization and Mapping) technology, the device can accurately position itself even in the absence of a GPS signal.
4. Real-time Data Processing
The device's built-in computer combines information from LiDAR, cameras, and IMU into a single colored point cloud without the need for complex post-processing.
Four powerful algorithms ensure accuracy and quality of the result, as if processed on a computer!
How to Obtain a Digital Model Using XGRIDS L2 Pro 16/120 Standard Package
- Turn on the device: LiDAR rotation starts (~10 seconds), connection with cameras and IMU is established.
- Start scanning: the laser transmits pulses, and cameras simultaneously take panoramic shots.
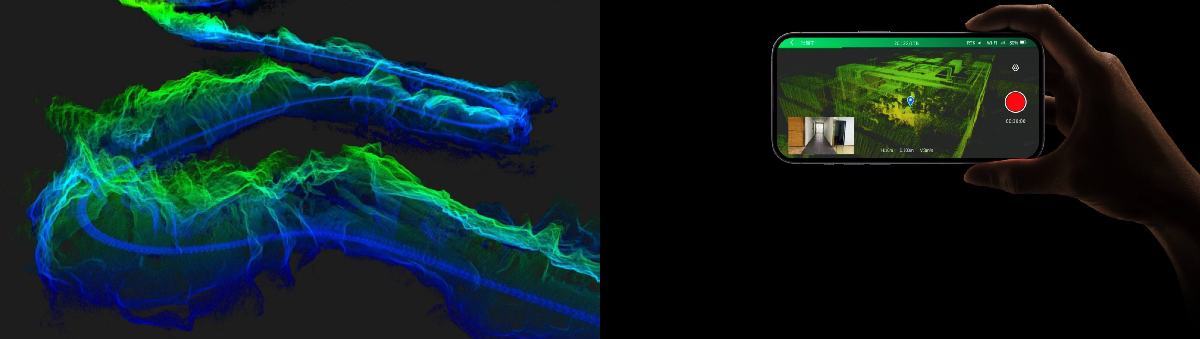
- AI and SLAM algorithms process data in real time: the result, a colored point cloud, is displayed on a smartphone or tablet screen.
- The generated point cloud is saved in .las format, after which it can be edited in Lixel Studio or CyberColor.
Differences Between XGRIDS L2 Pro and Surphaser
Surphaser Principle of Operation
Surphaser is a laser scanner with phase distance measurement, featuring a hemispherical (heliosperical) field of view. Its laser and mirror system rotates in two planes: vertically 360° and horizontally 270°, allowing it to capture object geometry with high accuracy.
This approach enables the creation of an extremely dense point cloud with sub-millimeter accuracy.
How XGRIDS L2 Pro Functions
This portable SLAM scanner combines a circular (360°) LiDAR sensor with stereo or high-resolution panoramic cameras (56 megapixels).
During scanning, the device performs real-time SLAM computations, creating a colored three-dimensional model with accuracy up to several centimeters.
Unlike Surphaser, which uses a mirror rotation system, XGRIDS relies on the user's movement and mobile positioning algorithms. Data is processed continuously, allowing for the quick formation of a digital spatial model.
Application Areas of the Handheld 3D Scanner
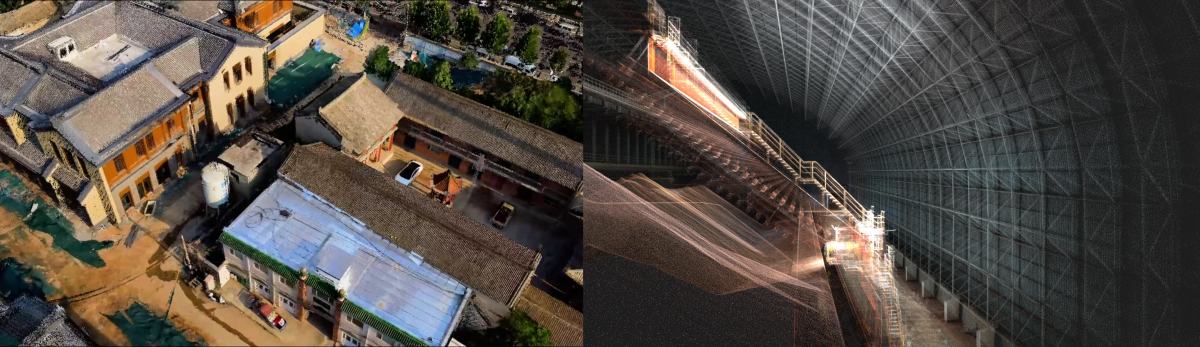
- Architecture and BIM: rapid data collection for digital twins, inventory, and construction progress control.
- Engineering and Construction: creating accurate 3D models of buildings, tunnels, bridges.
- Topography and Geodesy: large-scale surveying of terrain, forests, quarry sites.
- Cultural Heritage: precise recording of architectural monuments and artifacts.
- VR/AR, Game Dev: highly detailed environments with textures for immersive experiences and 3D games.
- Agriculture and Forestry: analysis of canopy structure, timber volume, and logging area planning.
- Inspections and Technical Audit: visual control of structures, tanks, pipelines.

Main Technical Specifications of XGRIDS L2 Pro 16/120
— Model: L2Pro, 32-channel, range up to 300 m.
— Scanning range: 0.5-300 m
— Scanning speed: 640,000 points/sec
— Cloud density: ~1 million points/m², step ~1 mm, layer thickness 5 mm
— Relative accuracy: ±1 cm (1 channel), ±2 cm (32 channels)
— Absolute accuracy: ≤ 3 cm
— Cameras: 2×48 MP panoramic
— Field of view: 360°×270°
— Data storage: 1 TB SSD
— Laser type: Class 1, 905 nm
— Power: Battery 46.8 Wh, up to 1.5 h; power consumption <30 W
— Interfaces: USB 3.1 Gen2, Wi-Fi, Bluetooth
— Protection IP54; operating temp -20 ... +50 ° C
— Weight and dimensions: ~1.7 kg without battery; 180×130×400 mm
— Export formats: .las, .ply, .jpg
— RTK module: RTK Fusion support
— Additionally: LixelUpSample™, real-time visualization, 5G transmission

What's Included in the Standard Package*
- 3D scanner L2Pro 32/300
- Battery and charger
- USB Type-C cable
- GCP plate
- Protective case
- Lixel Studio software license
- Manual and cleaning cloth
- Additionally, you can order: RTK kit (standard/Survey-grade), mounts, extension cable, field backpack and accessories
*The completeness of different product batches may vary. Please clarify the box contents with managers.

Choosing the XGRIDS L2 Pro 3D Scanner for Large Area Scanning means:
- Maximum scanning range and speed - 300 m and 640,000 points/sec.
- Instant generation of high-density point clouds with vibrant colors.
- Proven accuracy of ±1...3 cm ensures reliability even in critical projects.
- Extreme durability and convenience - weight <2 kg, IP54, autonomy up to 1.5 hours.
- Compatibility with RTK equipment allows use in professional geodetic tasks.
XGRIDSL2Pro32/300 is a high-performance, reliable, and versatile 3D scanner for a wide range of tasks: from construction and topography to VR development and cultural heritage preservation. It combines accuracy, mobility, and innovative software, elevating mobile scanning to a professional level. Call us, write in chat: we will gladly help you choose a 3D scanner for any task!









